Схема самодельного робота
У нас в школе недавно создали радиокружок, и я, как отличившийся по сборке различных радиосхем, должен был сделать какую-нибудь электронную игрушку или спаять схему, после чего написать доклад к этой игрушке или схеме. Долго думал, что спаять, и решил сделать робота самого простого, который уежает от света в темноту.
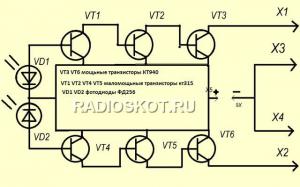
Сделан он на шести транзисторах, в моем случае вышло именно 6 транзисторов, но число их можно сократить, если взять более чуствительные фотодиоды, правда у меня не было их, так что пришлось поставить фд256. После фотодиодов стоит пара транзисторов кт315, после них стоят помощнее - кт940, они в придачу еще греются, если долго гонять робота, так что лучше поставить маленький кусочек алюминия.
Собрав внутрености, думал из чего сделать корпус. Сначала хотел его в старый нерабочий прибор засунуть, но места там было мало. А тут нашел в сарае нерабочую компьютерную мышь, убрав внутрености, убрав перегородки - получил достаточно места для конструкции. Пришлось заказывать двигатели для него, у меня не было двух одинаковых.
Освободив в корпусе мышки места под двигатели, закрепил их под углом. Моторы приклеил на клей "момент", пока сох клей - сделал дырки под фотодиоды. Сначало разместил их снизу, но потом передумал и поставил их верх. С виду получились, как глаза.
Клей засох, начал сбору всего робота, для питания конструкции поставил 2 аккумулятора от телефона, но при испытаниях робот еле-еле ехал. Потом поставил 3 аккумулятора - он резво начал ездить, почти летать, но в корпус третий АКБ не вмещался. Поэтому пришлось приподнять заднюю крышку верх, а щель закрыть куском изоленты.
Собрав до конца, склеил корпус клеем, вывел 2 провода для зарядки. Фото внутреностей не сделал, потому что корпус заклеен. В конце сборки и успешных испытаний, покрасил робота автомобильной матовой краской из балончка, перед этим заклеил фотодиоды, чтоб они не закрасились тоже. Разъёмы X1, X2, X3, X4 - это выводы к моторам.