Cамодельный мини-эхолот на микроконтроллере Atmel ATMega8L и ЖКИ от мобильного телефона nokia3310
Представляю вашему вниманию авторскую разработку
– самодельный мини-эхолот на микроконтроллере Atmel ATMega8L и ЖКИ от
мобильного телефона nokia3310. Устройство рассчитано для повторения
радиолюбителем средней квалификации, но, я думаю, конструкцию может повторить
каждый желающий. Материал я старался изложить так, чтобы читателям в доступной
форме дать побольше полезной информации по теме. Надеюсь, что повторение
конструкции принесет Вам много удовольствия и пользы.
Буду рад ответить на ваши вопросы/пожелания/замечания и помочь в повторении
конструкции.
С уважением, Alex
Эхолот, сонар
(sonar) - сокращение от SOund NAvigation and Ranging. Эхолот
известен где-то с 40-х годов, технология была разработана во время Второй мировой
войны для отслеживания вражеских подводных лодок. В 1957 году компания Lowrance
выпустила первый в мире эхолот на транзисторах для спортивной рыбной ловли.
Эхолот состоит из таких основных функциональных блоков: микроконтроллер,
передатчик, датчик-излучатель, приемник и дисплей. Процесс обнаружения дна (или
рыбы) в упрощенном виде выглядит следующим образом: передатчик выдает
электрический импульс, датчик-излучатель преобразует его в ультразвуковую волну
и посылает в воду (частота этой ультразвуковой волны такова, что она не
ощущается ни человеком, ни рыбой). Звуковая волна отражается от объекта (дно,
рыба, другие объекты) и возвращается к датчику, который преобразует его в
электрический сигнал .
Приемник усиливает этот возвращенный сигнал и посылает его в
микропроцессор. Микропроцессор обрабатывает принятый с датчика сигнал и
посылает его на дисплей, где мы уже видим изображение объектов и рельефа дна в
удобном для нас виде.
На что следует обратить внимание: рельеф дна эхолот рисует только в движении.
Это утверждение вытекает из принципа действия эхолота. Тоесть, если лодка
неподвижна, то и информация о рельефе дна неизменна, и последовательность
значений будет складываться из одинаковых, абсолютно идентичных значений. На
экране при этом будет рисоваться прямая линия.
Первый вопрос, который, я уверен, возникнет у
читателей «Почему использован такой маленький дисплей?» Поэтому я сразу на него
отвечу: этот «мини-эхолотик» разрабатывался по просьбе знакомого из того, что
оказалось под рукой. А этими подручными средствами оказались ATMega8L, дисплей
от nokia3310 и какой-то излучатель с обозначением f=200kHz. Еще Вы, наверное,
спросите возможно ли переделать программу/схему под другой, больший дисплей?
Да. Теоретически это возможно.
От эхолотов, описанных в [1, 2, 3] моя конструкция отличается применением
графического ЖК дисплея, что дает устройству преимущества в отображении
полезной информации.
Вся конструкция собрана в корпусе «Z14». Питание обеспечивается от аккумулятора
9В GP17R9H. Максимальный потребляемый ток не более 30 мА (в авторском варианте
23мА).
Теперь о возможностях эхолота. Рабочая частота 200 кГц и настраивается под
конкретный имеющийся излучатель. Программно реализована возможность измерять
глубину до 99, 9 метров.
Но скажу сразу: максимальная глубина, которую сможет «видеть» эхолот, в большой
степени будет зависеть от параметров примененного излучателя. Моя конструкция
на данное время тестировалась только на водоеме с максимальной глубиной около 4 м. Прибор показал отличные
результаты. По мере возможности постараюсь протестировать работу эхолота на
более больших глубинах, о чем будет сообщено читателям.
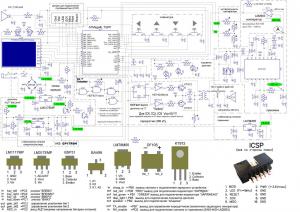
Основные функциональные блоки эхолота: схема управления (тоесть микроконтроллер ATMega8L), передатчик, излучатель, приемник, дисплей, клавиатура, схема зарядки аккумуляторной батареи.
Работает эхолот следующим образом: микроконтроллер на выводе РВ7 формирует управляющий сигнал (прямоугольные импульсы лог. «0») длительностью примерно 40 мкс. Этот сигнал запускает на указанное время задающий генератор с рабочей частотой 400 кГц на микросхеме IC4. Далее сигнал подается на микросхему IC5, где частота сигнала делится на 2. Сигнал с IC5 подается на буферный каскад на микросхеме IC6 и далее на ключи Q3 и Q4. Далее сигнал со вторичной обмотки трансформатора Т1 подается на пьезокерамический датчик-излучатель LS2, который посылает ультразвуковые посылки во внешнюю среду.
Отраженный от дна/препятствия сигнал принимается датчиком-излучателем и подается на вход приемника, который собран на микросхеме SA614AD в типовом включении (см. Datasheet на SA614AD). Диодная сборка BAV99 на входе приемника ограничивает входное напряжение приемника в момент работы передатчика.
Сигнал с приемника подается на компаратор на микросхеме LM2903, чувствительность которого регулируется микроконтроллером.
Далее сигнал обрабатывается в микроконтроллере и отображается в нужном виде на графическом ЖК дисплее 84х48 точек.
Трансформатор Т1 передатчика намотан на сердечнике К16*8*6 из феррита M1000НМ. Первична обмотка наматывается в 2 провода и содержит 2х14 витков, вторичная – 150 витков провода ПЭВ-2 0, 21мм. Первой мотается вторичная обмотка. Половины первичной обмотки должны быть «растянуты» по всей длине сердечника. Обмотки необходимо изолировать друг от друга слоем лакоткани или трансформаторной бумаги.
Теперь самая интересная и проблемная часть:
датчик-излучатель. У меня эта проблема была решена изначально: у меня уже был
готовый излучатель. Как быть Вам?
Вариант 1: приобрести готовый датчик.
Вариант 2: изготовить самому из пьезокерамики ЦТС-19.