Пассивный регулятор тембра классический полный
Другой, не столь существенный недостаток таких регуляторов - необходимость применения переменных резисторов с экспоненциальной зависимостью сопротивления от угла поворота движка (группа "В"), обеспечивающих плавное регулирование. Однако простота конструкции и высокие качественные показатели все же склоняют конструкторов к использованию именно пассивных регуляторов тембра.
Следует отметить, что эти регулятроы требуют низкого выходного сопротивления предшествующего каскада и высокого входного сопротивления последующего.
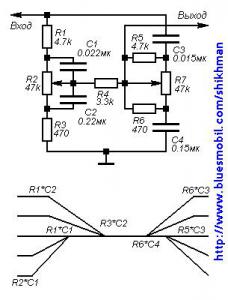
Разработанный английским инженером Баксандалом в 1952 году регулятор тембра [1] стал, пожалуй, самым распространенным частотным корректором в электроакустике. Классический вариант схемы состоит из образующих мост двух звеньев первого порядка - низкочастотного R1C1R3C2R2 и высокочастотного C3R5C4R6R7 (рис.1, а). Аппроксимированные логарифмические амплитудно-частотные характеристики (ЛАЧХ) такого регулятора приведены на рис.1, б. Там же приведены расчетные зависимости для определения постоянных времени точек перегиба АЧХ.
Теоретически максимально достижимая крутизна АЧХ для звеньев первого порядка составляет 6 дБ на октаву, но при практически реализуемых характеристиках из-за незначительного различия частот перегиба (не более декады) и влияния предшествующих и последующих каскадов она не превосходит 4...5 дБ на октаву. При регулировании тембра фильтр Баксандала меняет только наклон АЧХ без изменения частот перегиба. Вносимое регулятором на средних частотах затухание определяется соотношением n=R1/R3. Диапазон регулирования АЧХ при этом зависит не только от величины затухания n, но и от выбора частот перегиба частотной характеристики, поэтому для его увеличения частоты перегиба устанавливают в области средних частот, что, в свою очередь, чревато взаимным влиянием регулировок.